
Zitat von Johannes Erdmann. Recht hat er. Seine interessante Seite findet sich übrigens hier.
Wir haben die vergangenen Tage damit verbracht, unser Schiff weiter auf unsere Abfahrt Mitte April vorzubereiten. Die Fenster wurden final abgedichtet, die Maschinen gewartet, das Gelcoat an manchen Stellen repariert, das Rigg überprüft und vieles mehr. Unglaublich, aber auf einem Schiff gibt es wirklich immer was zu tun. Und wenn mal alles halbwegs up to date ist, sucht man sich sofort eine neue Aufgabe. Und die kommt hier:
Unser Autopilot, der ja nun doch einige Jahre auf dem Buckel hat und bei der Überfahrt im Dauereinsatz (24/7) sein wird, soll ein Backup bekommen. Einen Backup-Autopilot zu kaufen geht dabei in die Tausende, daher basteln wir uns selbst einen – und zwar für unter 60 Euro. Möglich ist das durch das open-source-Projekt Arduino. Dabei handelt es sich um ein sehr günstiges, bereits fertig aufgebautes Microcontroller-Board mit digitalen sowie analogen Ein-/Ausgängen. Programmiert wird das Ganze dann in einer C-ähnlichen Sprache.
Funktionieren soll das dann im Wesentlichen so: Der Arduino bekommt den Kompasskurs von einem digitalen Kompass-Sensor, speichert den Wert dann ab und schaut nun andauernd, ob der aktuelle Wert mit dem abgespeicherten übereinstimmt. Tut er das nicht, schalten Relais die Hydraulikpumpe, die auf die Ruder wirkt, solange in die entsprechende Richtung, bis unser Schiff soweit gedreht hat, dass es wieder innerhalb des Toleranzbereiches des Kurses liegt. Das Ganze geht dann wieder von vorne los und dadurch wird der gewünschte Kurs dann (hoffentlich) gehalten.
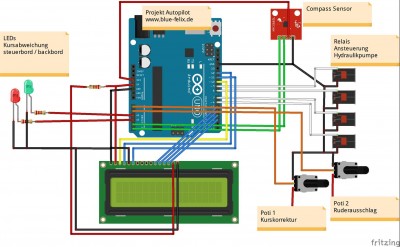
Schaltplan Arduino Autopilot, erste Test-Version.
Bisher steht die Programmierung schon so weit, dass aktuelle Peilung und Zielkurs korrekt ausgelesen bzw. berechnet und auf dem Display angezeigt werden. Auch eine Justiermöglichkeit für den Zielkurs über einen Poti ist bereits realisiert. Weiterhin zeigen eine grüne und rote LED Abweichungen des aktuellen Kurses über den Toleranzbereich hinweg an. Die nächsten Tage kommt dann noch die Ansteuerung der Relais für die Hydraulikpumpe hinzu. Und dann heißt es beim ersten Test hoffentlich nicht „klar zur Patenthalse…“.
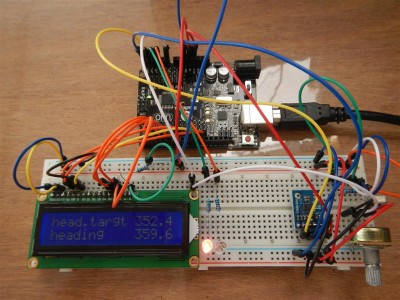
Autopilot auf Arduino-Basis, erste Test-Version.
Das Projekt ist zwar etwas Zeit intensiv, macht aber einen Riesen Spaß (Ballmer-Peak). Außerdem ist die Zeit gut investiert, da bei einem Ausfall unseres Autopiloten wir ja ununterbrochen Ruder gehen müssten, was nur zu zweit auf so einer langen Passage fast nicht zu bewältigen wäre.